融合人类典型决策特点的人机共享控制方法研究
研究背景与意义
共享控制是一类重要的人机协同控制方法,当前已经受到众多关注。随着人工智能技术的快速发展,机器智能已经得到越来越多的应用,但在某些场景中,其仍欠缺鲁棒性、可解释性、适应性。为了结合机器智能与人类智能的优势,人机协同控制应运而生[1]。在人机协同控制中,共享控制是一类重要的人机协同控制方法,在这种模式下,人类操作者与AI赋能的自动化系统或机器人通过共享决策权以达成共享的目标[2],其基本形式如下图:
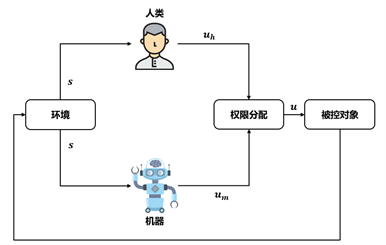
图1 人机共享控制的基本结构
相比于单纯的人类控制或者机器算法控制,共享控制的优势体现在以下几个方面:
- 优势互补:共享控制可以利用双方的优势。人类擅长处理复杂情况下的判断和决策,而机器则在重复性高、精度要求高的任务上表现优异。通过共享控制,两者可以取长补短,提高整体性能[3]。
- 提高安全性:在一些危险环境中(如核废料清理、深海探测[4], [5]),由人类直接参与可能会带来风险。采用人机共享控制可以让人类从远处安全参与任务,同时保留了人类的决策能力以应对突发状况。
- 降低人类负担:通过合理分配控制权限,人类可以降低输入负荷,将更多精力投入到更偏向判断和决策等高级任务当中,提升工作效率[6]。 正由于这些特性,共享控制在康复机器人、交通、制造等领域中开始得到应用[7], [8], [9]。
面向人类决策特点进行共享控制设计非常关键,有助于提升共享控制效能。人类是共享控制中的必不可少的参与者,并且人类的决策特点会影响其在共享控制中的表现,进而影响人机系统整体的表现。例如,人类在决策过程中可能受情感、偏好甚至是社会因素等难以建模的因素影响,导致人在某些情况下可能给出较差的决策,如果共享控制在这种情形下不能对这种较差的人类决策产生合适的响应,则共享控制的效能会降低;又比如,人的决策能力会随着经验的积累出现提升,这就要求共享控制能够顺应这种提升,否则无法发挥应有的效能。如果能对以上人类决策特点进行建模,并在共享控制方法的设计过程中进行针对性考虑,则可以提升所设计的共享控制方法的效能,为更多不同场景下的共享控制方法的应用提供设计参考。当然,对于人类这样复杂的系统,尚不存在对其控制、决策原理的完整精确刻画模型[10]。不过,不同的情境下,人类决策可能更集中地表现出某一种典型特点,我们可以面向这些典型的决策特点设计不同的共享控制方法。研究相关的内容包括不同决策特点下的人类建模、模型辨识、权限分配的设计以及相关的理论分析,以期面向不同特性的人类进行设计时提供理论参考与设计原则。
研究现状
共享控制有时也被称为“共享自主”(shared autonomy)或“共享权限”(shared authority),其目标主要在于将人类操作者的输入与自主系统的输入集成,以产生机器的最终行为[11]。在共享控制中,强调人和自主系统的平等关系,同时存在于控制回路中相互作用,以实现共享的目标[12]。共享控制将人和机器视为两个独立的源,并通过一个决定各自相对贡献的仲裁函数进行结合。最为广泛使用的仲裁函数为线性仲裁[13],其形式如下: $a=λa_h+(1-λ) a_m$, 其中$λ∈[0,1]$表示人的控制权限,$a_h$和$a_m$分别表示人和自主系统的控制命令。$λ$可以是固定值或者是变量。当然,也有其他形式的仲裁函数,包括概率形式[14]、基于POMDP的形式[15]等。
当前共享控制的研究更关注实际应用,而缺乏相关的理论指导。共享控制的相关研究主要可以分为面向理论方法与实际应用的研究:一方面,对基本共享控制策略进行研究,探究通用的一般共享控制方法;另一方面,基于基本的共享控制方法,面向实际应用中的特定对象设计共享控制方法。当前共享控制的研究主要集中在驾驶、机械臂抓取等实际应用场景[16], [17], [18]。与研究人员在解决实际问题上的努力相比,对统一的、具有指导性的共享控制的理论与指导原则的探索显得相对匮乏。通用的基本共享控制方法研究则较为零散,缺乏相关的理论体系。Dragan等人[13]早期尝试将共享控制的形式进行统一,并将共享控制分为“预测”(人想做什么)加“仲裁”(如何根据预测辅助人类)两步,并且对预测与仲裁的典型形式以及设计原则进行了初步讨论,但进行讨论的情境相对简单,并且彼时控制器还远不具有AI赋能的特性。Abbink等人[19]尝试统一共享控制框架,并给出了共享控制方法的三条设计原则;之后又依托于人机共驾场景,讨论了共享控制与介入控制的特性[20],但他们的讨论更偏向于一种定性分析,而缺乏数学上的讨论。
现有的共享控制研究更多地考虑机器特性,而对人类的决策特点缺乏考虑;有少量相关研究开始尝试将人类特性考虑进共享控制中,但都不够深入、缺乏泛用性,整体上也显得比较零散,缺乏系统性。有一部分研究对人类特性进行了初步考虑,但是对人的考虑比较粗糙。例如文献[21]通过对具有不同驾驶经验的驾驶员进行了分别的统计调查,根据他们各自的意愿设计了不同情境下的模糊共享控制规则,仅仅是依照统计结果进行简单分类,缺乏对人类决策特点的考虑。还有一部分研究在特定应用中将人类建成特定的控制模型进一步进行共享控制,例如各类驾驶员模型或飞行员模型在汽车与飞机的共享控制中的应用[22], [23]。这类方法本质上是将人类决策建模成控制器,并不能充分体现人类的决策特点,并且也缺乏通用性。还有极少数研究直接将人类的决策特点在共享控制中进行考虑,与本研究方向较为契合,但相对零散且初步。例如, Byeon等人[24], [25]在面向线性时不变系统的共享控制中考虑了人类模型,将人类建模为一个参数可演化的状态反馈控制器,通过比较新手与专家的反馈增益矩阵的差异进行共享控制的权限分配,不过建模相对简单,并且没有体现人类决策的次优特点。文献[26]则将人机共享控制建模成二人非零和线性二次动态博弈,并且用K-等级人类模型对人类有限理性进行建模,通过强化学习识别人类认知水平,并在此基础上提出了一种主动共享控制方法。
综上所述,当前融合人类决策特点的共享控制的研究相对缺乏,较为零散,仅有的相关研究对人类的决策特点也考虑不周,不成系统性。因此,研究融合典型人类决策特点的共享控制方法,为构建共享控制理论体系提供支持,成为本研究方向的主要目标。
参考文献
- [4]C. Dai, C. Zong, D. Zhang, M. Hua, H. Zheng, and K. Chuyo, “A Bargaining Game-Based Human-Machine Shared Driving Control Authority Allocation Strategy,” IEEE Transactions on Intelligent Transportation Systems, May 2023.
- [8]C. Ezeh, P. Trautman, L. Devigne, V. Bureau, M. Babel, and T. Carlson, “Probabilistic vs Linear Blending Approaches to Shared Control for Wheelchair Driving,” in 2017 International Conference on Rehabilitation Robotics (ICORR), 2017, pp. 835–840.
- [9]Z. Fang et al., “Authority Allocation Strategy for Shared Steering Control Considering Human-Machine Mutual Trust Level,” IEEE Transactions on Intelligent Vehicles, 2023.
- [10]F. Flemisch, D. A. Abbink, M. Itoh, M.-P. Pacaux-Lemoine, and G. Weßel, “Joining the Blunt and the Pointy End of the Spear: Towards a Common Framework of Joint Action, Human–Machine Cooperation, Cooperative Guidance and Control, Shared, Traded and Supervisory Control,” Cognition, Technology & Work, vol. 21, no. 4, pp. 555–568, Nov. 2019.
- [11]B. A. C. Forsyth and K. E. Maclean, “Predictive Haptic Guidance: Intelligent User Assistance for the Control of Dynamic Tasks,” IEEE Transactions on Visualization and Computer Graphics, vol. 12, no. 1, pp. 103–113, Jan. 2006.
- [12]K. Ghonasgi, T. Higgins, M. E. Huber, and M. K. O’Malley, “Crucial Hurdles to Achieving Human-Robot Harmony,” Science Robotics, vol. 9, no. 96, p. eadp2507, Nov. 2024.
- [14]G. Li, Q. Li, C. Yang, Y. Su, Z. Yuan, and X. Wu, “The Classification and New Trends of Shared Control Strategies in Telerobotic Systems: A Survey,” IEEE Transactions on Haptics, vol. 16, no. 2, pp. 118–133, Apr. 2023.
- [15]Z. Li, S. Zhao, J. Duan, C.-Y. Su, C. Yang, and X. Zhao, “Human Cooperative Wheelchair with Brain–Machine Interaction Based on Shared Control Strategy,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 1, pp. 185–195, 2016.
- [16]Y. Li and S. S. Ge, “Human–Robot Collaboration Based on Motion Intention Estimation,” IEEE/ASME Transactions on Mechatronics, vol. 19, no. 3, pp. 1007–1014, Jun. 2014.
- [19]P. Marion et al., “Director: A User Interface Designed for Robot Operation with Shared Autonomy,” Journal of Field Robotics, vol. 34, no. 2, pp. 262–280, Mar. 2017.
- [23]J. Wang, M. Dai, G. Yin, and N. Chen, “Output-Feedback Robust Control for Vehicle Path Tracking Considering Different Human Drivers’ Characteristics,” Mechatronics, vol. 50, pp. 402–412, Apr. 2018.
- [24]H.-N. Wu, X.-Y. Jiang, and M. Wang, “Human Cognitive Learning in Shared Control via Differential Game With Bounded Rationality and Incomplete Information,” IEEE Transactions on Artificial Intelligence, vol. 5, no. 10, pp. 5141–5152, Oct. 2024.
- [25]C. Yang, Y. Zhu, and Y. Chen, “A Review of Human–Machine Cooperation in the Robotics Domain,” IEEE Transactions on Human-Machine Systems, vol. 52, no. 1, pp. 12–25, Feb. 2022.